Kota Kondo
MIT Aerospace Controls Laboratory | Multiagent Systems | Trajectory Planning | Optimization | Learning-based Planning

I am a graduate student at MIT AeroAstro, working in the Aerospace Controls Lab (ACL) under the guidance of Professor Jonathan How. My research interests focus on multiagent systems, optimization, and learning-based trajectory planning.
My current research focuses on spatiotemporal trajectory planning for dynamic unknown environments, heterogeneous robot teams, learning-based multiagent trajectory planning utilizing diffusion models, and perception-aware and uncertainty-aware trajectory planning. My past experience includes detumbling an under-actuated spacecraft with a single-axis magnetic actuator and quadcopter path planning with an onboard EMPC controller.
news
| Apr 2026 | Submitted SANDO: Safe Autonomous Trajectory Planning for Dynamic Unknown Environments to arXiv. Paper / Code / Video |
|---|---|
| Apr 2026 | MIGHTY accepted to IEEE Robotics and Automation Letters (RA-L). Paper / Code |
| Nov 2025 | Submitted MIGHTY: Hermite Spline-based Efficient Trajectory Planning to IEEE Robotics and Automation Letters. Paper / Code |
| Sep 2025 | Paper on Efficient Navigation in Unknown Indoor Environments with Vision-Language Models accepted to IROS 2025 OWN Workshop. |
| Apr 2025 | Submitted DYNUS: Uncertainty-aware Trajectory Planner in Dynamic Unknown Environments to IEEE Transactions on Robotics. Paper / Code |
projects






publications
-
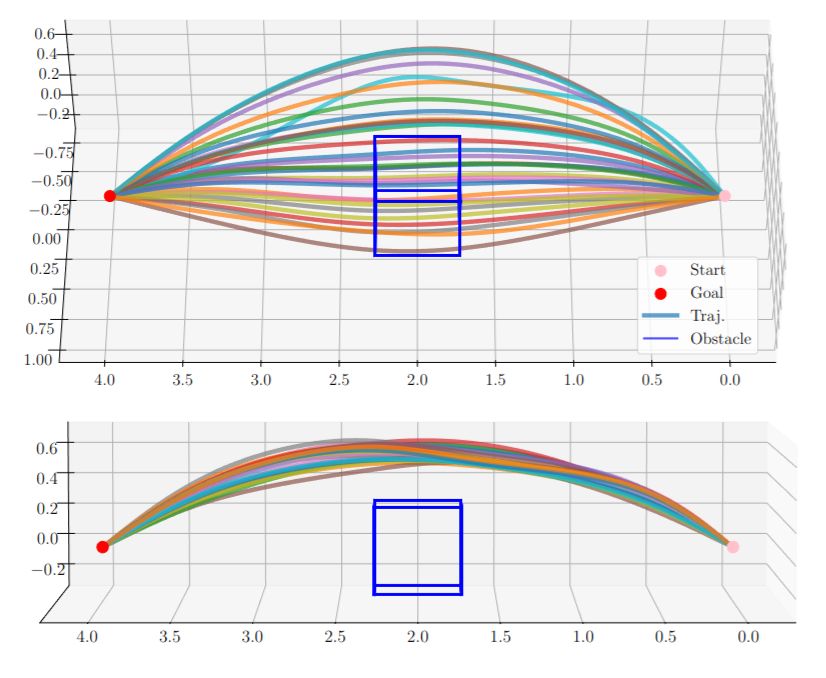 CGD: Constraint-Guided Diffusion Policies for UAV Trajectory PlanningIn IEEE Conference on Decision and Control (CDC), 2024
CGD: Constraint-Guided Diffusion Policies for UAV Trajectory PlanningIn IEEE Conference on Decision and Control (CDC), 2024 -
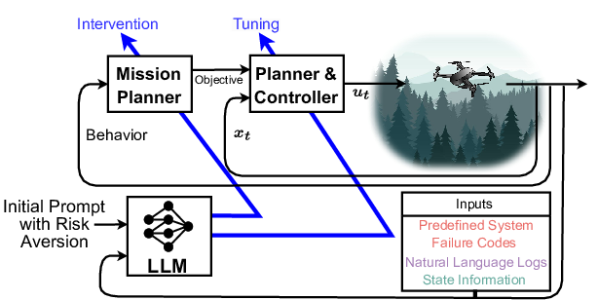 REAL: Resilience and Adaptation using Large Language Models on Autonomous Aerial RobotsIn IEEE Conference on Decision and Control (CDC), 2024
REAL: Resilience and Adaptation using Large Language Models on Autonomous Aerial RobotsIn IEEE Conference on Decision and Control (CDC), 2024 -
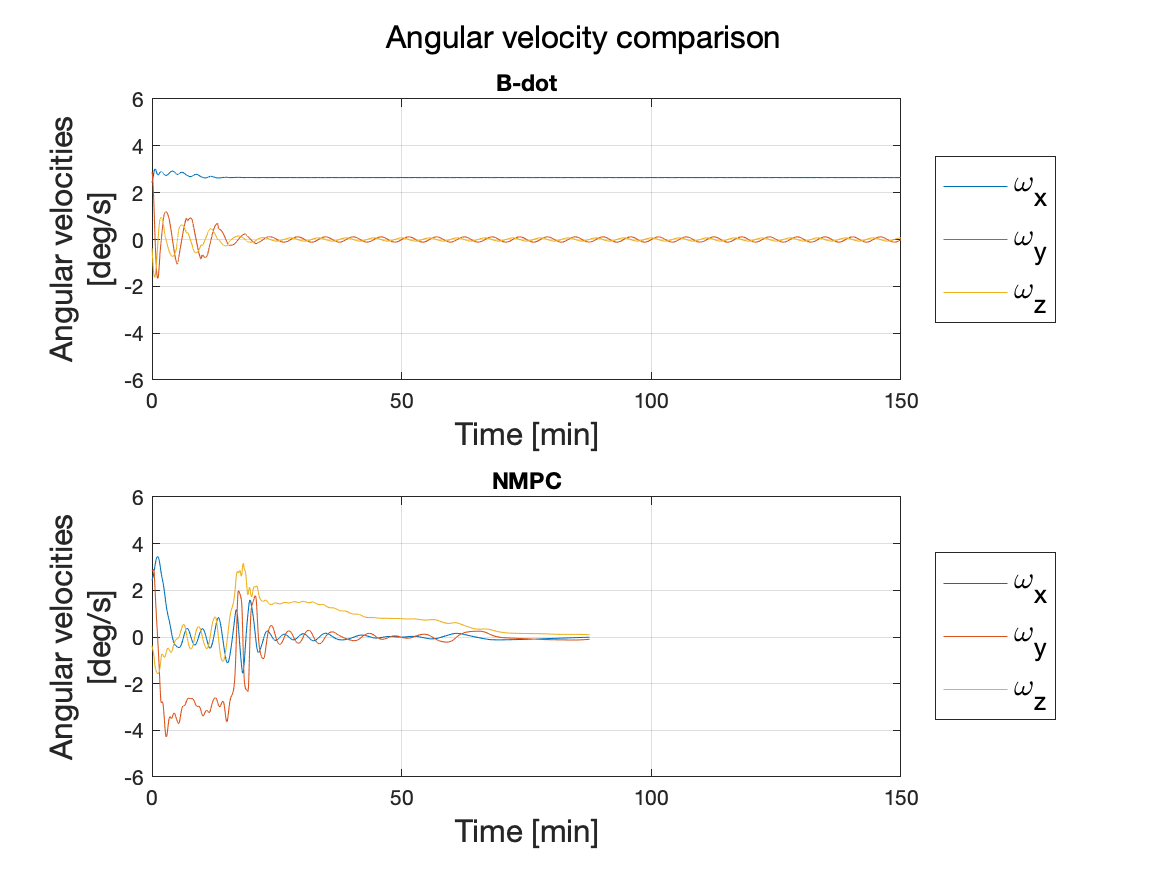 Nonlinear Model Predictive Detumbling of Small Satellites with a Single-Axis Magnetic ActuatorJournal of Guidance, Control, and Dynamics, 2021
Nonlinear Model Predictive Detumbling of Small Satellites with a Single-Axis Magnetic ActuatorJournal of Guidance, Control, and Dynamics, 2021 - Pulse Width Modulation Method Applied to Nonlinear Model Predictive Control on an Under-actuated Small SatelliteIn AIAA SciTech Forum, 2021
- Model Predictive Approach for Detumbling an Underactuated SatelliteIn AIAA SciTech Forum, 2020
- Detumbling with Model Predictive Control for an Underactuated Small SatelliteIn AIAA Region VII Australia/International Student Conference, 2019