REAL
resilience and adaptation using large language models on autonomous aerial robots
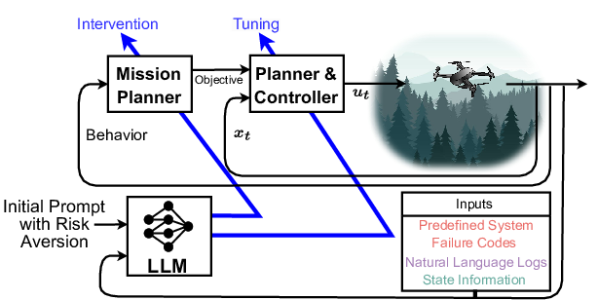
Large Language Models (LLMs) pre-trained on internet-scale datasets have shown impressive capabilities in code understanding, synthesis, and general purpose question-and-answering. In this work, we aim to harness the extensive long-term reasoning, natural language comprehension, and the available prior knowledge of LLMs for increased resilience and adaptation in autonomous mobile robots. REAL provides a strategy to employ LLMs as a part of the mission planning and control framework of an autonomous robot.
References
2024
-
 REAL: Resilience and Adaptation using Large Language Models on Autonomous Aerial RobotsIn IEEE Conference on Decision and Control (CDC), 2024
REAL: Resilience and Adaptation using Large Language Models on Autonomous Aerial RobotsIn IEEE Conference on Decision and Control (CDC), 2024
