CGD
constraint-guided diffusion policies for UAV trajectory planning
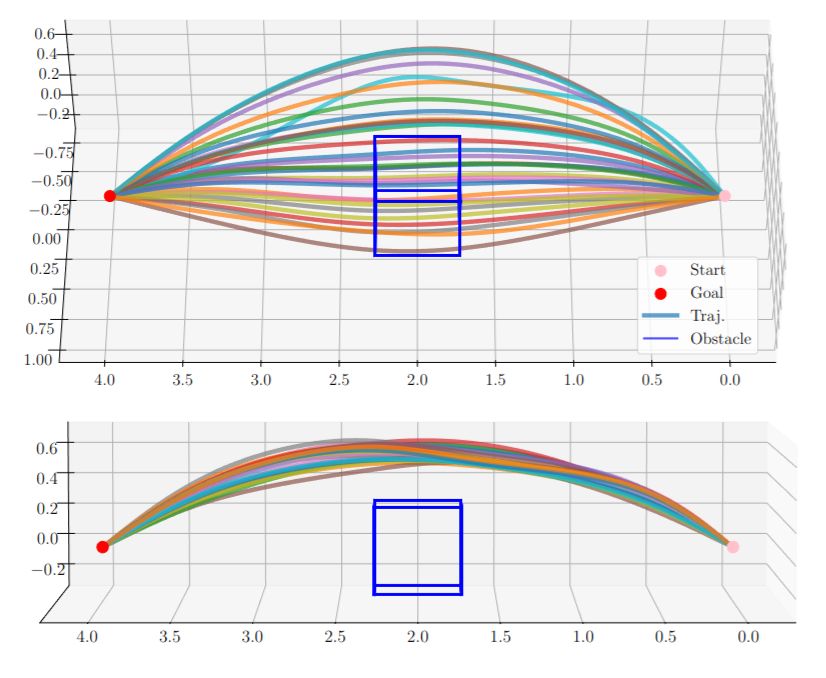
Traditional optimization-based planners, while effective, suffer from high computational costs, resulting in slow trajectory generation. CGD leverages a hybrid learning/online optimization scheme that combines diffusion policies with a surrogate efficient optimization problem, enabling the generation of collision-free, dynamically feasible trajectories.
References
2024
-
 CGD: Constraint-Guided Diffusion Policies for UAV Trajectory PlanningIn IEEE Conference on Decision and Control (CDC), 2024
CGD: Constraint-Guided Diffusion Policies for UAV Trajectory PlanningIn IEEE Conference on Decision and Control (CDC), 2024
